




















ساخت ربات های خودآموز برای نظافت خانه
پژوهشگران دانشگاه صنعتی وین موفق به تولید یک ربات خودآموز شدند که میتواند وظایف سادهای مثل تمیز کردن سینک را انجام دهد. به گزارش تکناک، این ربات میتواند نظافت خانه را مانند انسانها انجام دهد و مفهوم رباتهای نظافتی را به واقعیت نزدیکتر کند. با اینکه این موضوع ممکن است ساده به نظر برسد، اما […] نوشته ساخت ربات های خودآموز برای نظافت خانه اولین بار در تک ناک. پدیدار شد.
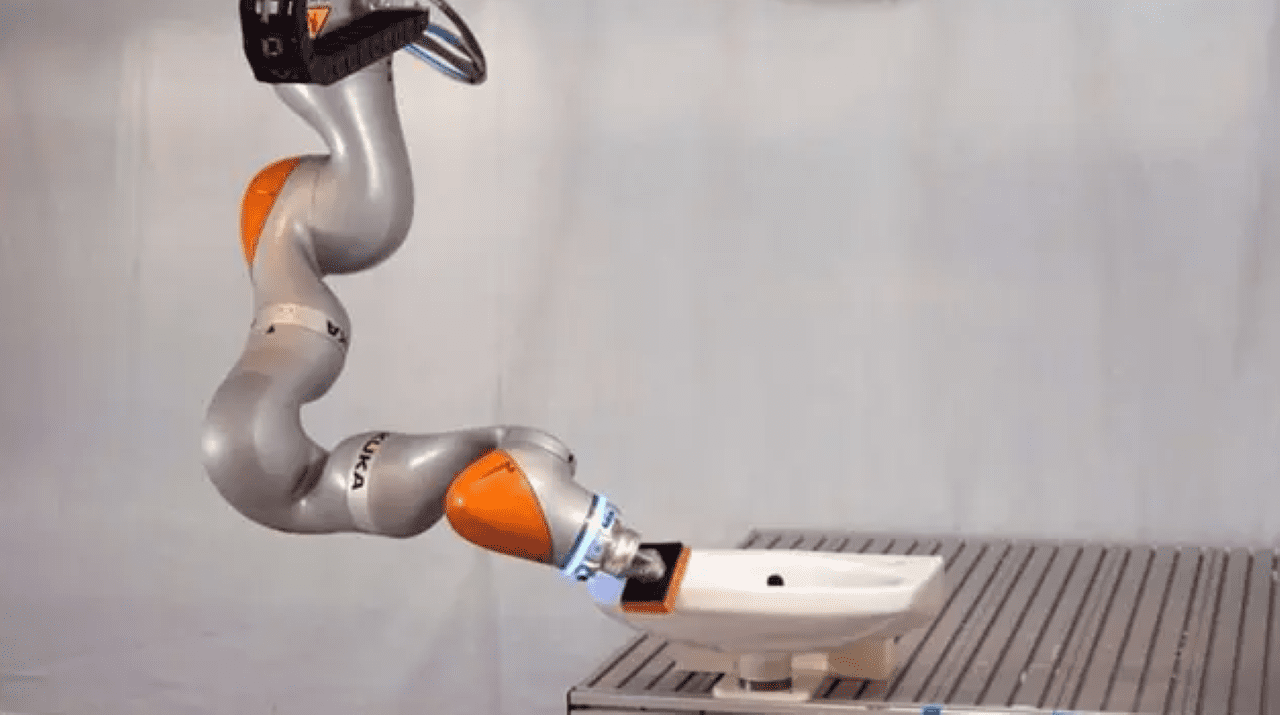
پژوهشگران دانشگاه صنعتی وین موفق به تولید یک ربات خودآموز شدند که میتواند وظایف سادهای مثل تمیز کردن سینک را انجام دهد.
به گزارش تکناک، این ربات میتواند نظافت خانه را مانند انسانها انجام دهد و مفهوم رباتهای نظافتی را به واقعیت نزدیکتر کند. با اینکه این موضوع ممکن است ساده به نظر برسد، اما پیشرفت در این زمینه خیلی مهم است.
برنامهنویسی یک ربات برای حرکت دادن یک اسفنج روی لبههای پیچیده و منحنی یک سینک برای شستوشوی آن کار سختی است. تیم تحقیقاتی برای حل این مشکل، روشی پیدا کردهاند که با ترکیب مشاهده و دادههای لمسی از معلمان انسانی، رباتها را آموزش دهند تا همان کار را اجرایی کنند.
این تکنولوژی تنها در خانه کاربرد ندارد. همان روش یادگیری میتواند در صنایع مختلف مانند: پولیش کردن سطوح، نقاشی، سنبادهزنی و چسباندن مواد استفاده شود.
پرفسور آندریاس کوگی از دانشگاه صنعتی وین گفت: «ضبط شکل هندسی سینک با دوربینها کار راحتی است، اما این مرحله مهم نیست. چالش واقعی این است که به ربات یاد بدهیم چطور باید برای هر قسمت از سطح حرکت کند، سرعت حرکت باید چقدر باشد، زاویه مناسب به چه صورت است و چه میزان نیرو نیاز میباشد.»
این همان روشی است که انسانها برای یادگیری وظایف جدید، به ویژه مهارتهایی مانند: صنایع دستی، استفاده میکنند.
یادگیری از طریق مشاهده توسط ربات خودآموز
کریستیان هارتل-نسیک، یکی از محققان این تحقیق عنوان کرد: «در یک کارگاه، ممکن است کسی از پشت سر شاگرد را تماشا کند و بگوید که باید کمی بیشتر روی یک قسمت خاص فشار بیاورد. ما میخواستیم روشی پیدا کنیم که ربات خودآموز هم همینطور یاد بگیرد.»
همانطور که گفته شد، تیم تحقیقاتی این کار را با توسعه یک ابزار خاص برای آموزش ربات انجام دادند. این ابزار یک اسفنج حساس مجهز به سنسور است. با استفاده از این اسفنج، معلمان انسانی از سنسورهای فشار و نشانگرهای ردیابی برای تمیز کردن مکرر لبه جلویی سینک استفاده کردند.
کریستیان هارتل-نسیک توضیح داد: «ما از طریق چند پیشنمایش، دادههای زیادی تولید کردیم و سپس پردازش شدند تا به ربات کمک کنند که متوجه شود تمیز کردن مناسب چه ویژگیهایی دارد.»
با استفاده از این دادهها، تیم تحقیقاتی از یک استراتژی نوآورانه پردازش داده که توسط تیم تحقیقاتی دانشگاه صنعتی وین (TU Wien) توسعه یافته است، برای تسهیل فرایند یادگیری استفاده کردند.
ابتدا دادههای اندازهگیری به طور آماری پردازش میشوند و نتایج بهدستآمده برای آموزش یک شبکه عصبی مورد استفاده قرار میگیرند تا اجزای حرکتی از پیش تعریفشده، که به عنوان مفاهیم حرکتی شناخته میشوند، شناسایی گردند.
این الگوریتم یادگیری پیشرفته به ربات اجازه میدهد تا پس از آموزش، حتی زمانی که فقط روش تمیز کردن یک طرف سینک به او نشان داده شده باشد، به طور مؤثر تمام سینک یا سایر اجسام با سطوح پیچیده را تمیز کند!
انتقال آنچه که آموخته شده است
ربات میآموزد که بسته به شکل سطح، باید اسفنج را به شیوه متفاوتی نگه دارد و اینکه برای تمیز کردن یک ناحیه منحنی، باید نیروی متفاوتی نسبت به یک سطح صاف اعمال کند.
در آینده ممکن است این ربات خودآموز روی یک پلتفرم متحرک نصب شود تا به عنوان دستیاری ارزشمند در هر محیط کارگاهی عمل کند. همانطور که انسانهای ماهر و باتجربه یاد میگیرند، این رباتها نیز میتوانند آنچه که آموختهاند را به رباتهای دیگر منتقل کنند.
فرض کنید در کارگاههای مختلف از این رباتهای خودآموز برای سنبادهزنی یا رنگآمیزی استفاده میشود. در این صورت، هر ربات میتواند به طور مستقل تجربه کسب کند و دادههای خاص خود را یاد بگیرد و تمام رباتها میتوانند اطلاعات و مهارتهایی که آموختهاند را با یکدیگر به اشتراک بگذارند.
این مطالعه در مجله IROS 2024 منتشر شده است.
نوشته ساخت ربات های خودآموز برای نظافت خانه اولین بار در تک ناک. پدیدار شد.
واکنش شما چیست؟