









این بازوی رباتیک عملکرد مفاصل انسان را تقلید می کند
محققان به تازگی یک بازوی رباتیک ساختهاند، که تناسبات بدن انسان، وزن، آرایش عضلات و عملکرد مفاصل را تقلید میکند تا فواید آن را بهینه نماید. به گزارش تکناک، این بازوی رباتیک با استفاده از عضلات مصنوعی، امکان انجام وظایف پیچیده و حساس را با دقت بالا فراهم میکند. این فناوری میتواند در صنایع مختلف... نوشته این بازوی رباتیک عملکرد مفاصل انسان را تقلید می کند اولین بار در تک ناک - اخبار دنیای تکنولوژی. پدیدار شد.
محققان به تازگی یک بازوی رباتیک ساختهاند، که تناسبات بدن انسان، وزن، آرایش عضلات و عملکرد مفاصل را تقلید میکند تا فواید آن را بهینه نماید.
به گزارش تکناک، این بازوی رباتیک با استفاده از عضلات مصنوعی، امکان انجام وظایف پیچیده و حساس را با دقت بالا فراهم میکند. این فناوری میتواند در صنایع مختلف از جمله پزشکی و تولیدی کاربرد داشته باشد.
تیمی در آزمایشگاه JSK در دانشگاه توکیو، دو موتور عضلانی ایجاد کردند که در یک ماژول واحد ادغام شدند و فضا را با اجزای مشترک به حداکثر رساندند. این ماژول به عنوان ساختار استخوان عمل میکند.
همچنین در این بازوی رباتیک یک سری موتورهای مینیاتوری مورد استفاده قرار گرفت و روشی برای اتلاف گرمای موتور از طریق ساختار استخوان ایجاد شد.
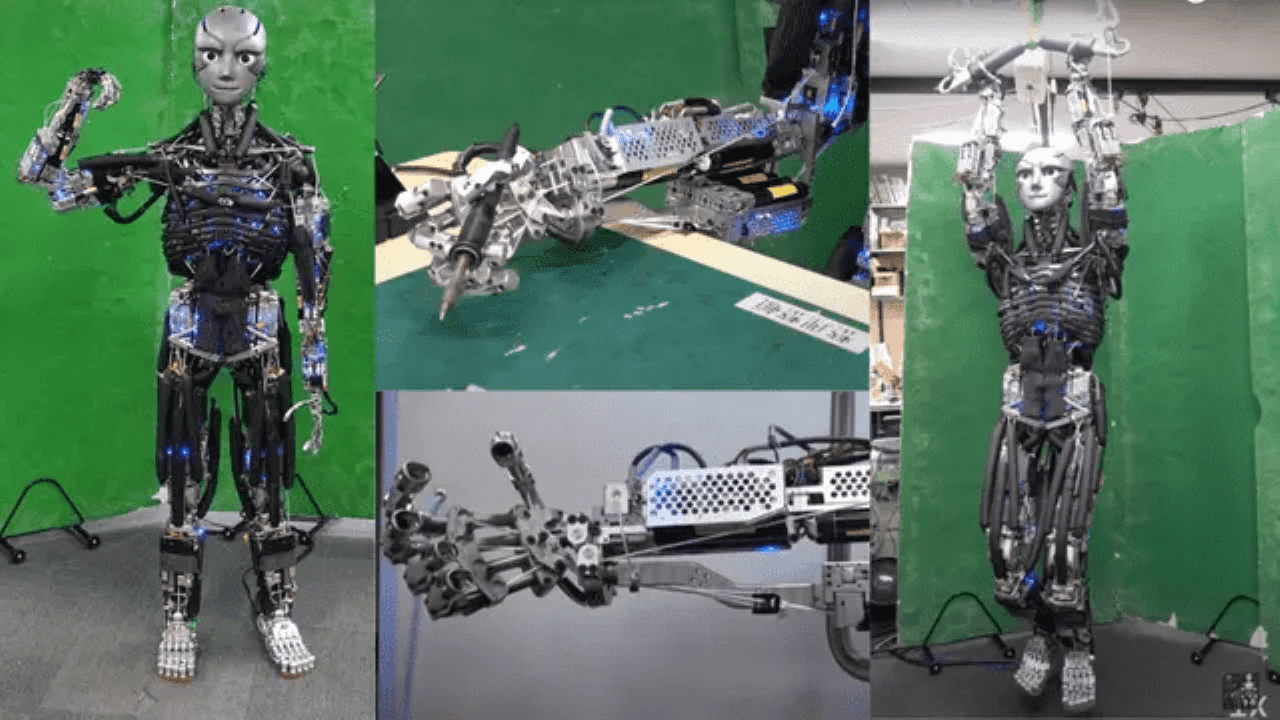
به گفته محققان، این رویکردها باعث ایجاد یک بازو با مفصل رادیواولنار شد، که نسبتها، وزن، آرایش عضلانی و عملکرد مفصل انسان را تقلید میکند.
این بازوی رباتیک کارهایی مانند: لحیم کاری، باز کردن کتاب و استفاده از بدمینتون را انجام داد، که نشاندهنده توانایی ربات در اجرای حرکات ماهرانه و انسانمانند با استفاده از ساختار رادیواولنار بود.
ماژول عضلانی مینیاتوری
در سالهای اخیر شاهد توسعه شدید رباتهای انساننما بودهایم و با ASIMO شروع شد، که حرکت انسان را با دو دست و پا تقلید میکند.
امروزه تحقیقات به رباتهای انساننمای اسکلتی عضلانی تاندونمحور گسترش یافته است، که نسبتهای بدن انسان، ساختارهای مفصلی، سیستمهای محرکه و آرایش ماهیچهای را برای تجزیه و تحلیل و دستیابی به حرکت انسانمانند تکرار میکنند.
در حالی که بسیاری از مطالعات روی تکثیر ساختارهای مفصل انسان تمرکز دارند، تعداد کمی مفصل رادیواولنار را با جزئیات بررسی کردهاند.
مدلهای موجود با این مفصل از محرکهای پنوماتیکی استفاده میکنند، که محدودیتهایی در کنترل و آرایش ماهیچهای دارند.
با توجه به محدودیتهای آرایش ماهیچهای، ساختار رادیواولنار بازوی انسان، متشکل از رادیوس و اولنا، برای تکثیر در رباتها چالش برانگیز است.
رباتهای انساننما تاندونمحور قبلی، مانند: Kojiro و Kenzoh، برای دستیابی به ساختار مفصلی دقیق تلاش میکردند.
برای رفع این مشکل، یک ماژول مینیاتوری استخوان-عضله توسعه داده شد، که دو محرک را در ساختار استخوان ادغام، فضا را بهینه میکند و دقت متناسب را بهبود میبخشد.
این ماژول از موتورهای مینیاتوری با اتلاف گرمای کارآمد برای حفظ تنش عضلانی بالا استفاده میکند. علاوه بر این، یک واحد اندازهگیری کشش فوق فشرده ایجاد شد، که باعث کاهش 39 درصدی صدا گردید.
به گفته محققان، این رویکرد نوآورانه امکان اتصال خطی ماژولهای عضلانی را فراهم میکند و ساختار رادیواولنار دقیقتر و قابل نگهداری را برای رباتهای انساننمای تاندون محور نسل بعدی امکانپذیر میسازد.
بازوی انسان از دو استخوان بلند و نازک به نامهای رادیوس و اولنا تشکیل شده است، که مفصل رادیواولنار را تشکیل میدهند.
این مفصل امکان حرکات منحصربهفرد انسان مانند نوشتن، چرخاندن دستگیره در و چرخاندن راکت را فراهم میکند.
محققان برای تکرار این موضوع در رباتها، با استفاده از ماژولهای مینیاتوری استخوانی، یک بازوی فشرده با مفصل رادیواولنار ایجاد کردند.
این طرح شبیه تناسبات انسان است، با دو ماژول در شعاع و اولنا، که در مجموع هشت عضله را تشکیل میدهند.
این ماهیچهها شش درجه آزادی (DOFs) را کنترل میکنند، که شامل مفصل رادیواولنار، مفصل رادیوکارپال و حرکات انگشتان میشود.
حرکت بازوی رباتیک انسانمانند
طراحی جمع و جور این ماژول نسبتهای بدن و نسبت وزن صحیح را حفظ میکند و در عین حال آزادی عضلانی بیشتری را نسبت به سایر رباتها ارائه میدهد.
محققان با موفقیت بازویی را ایجاد کردند که عملکرد مفصل انسان را منعکس و امکان انجام حرکات دقیق و ماهرانه مشابه حرکات انسان را فراهم میکند.
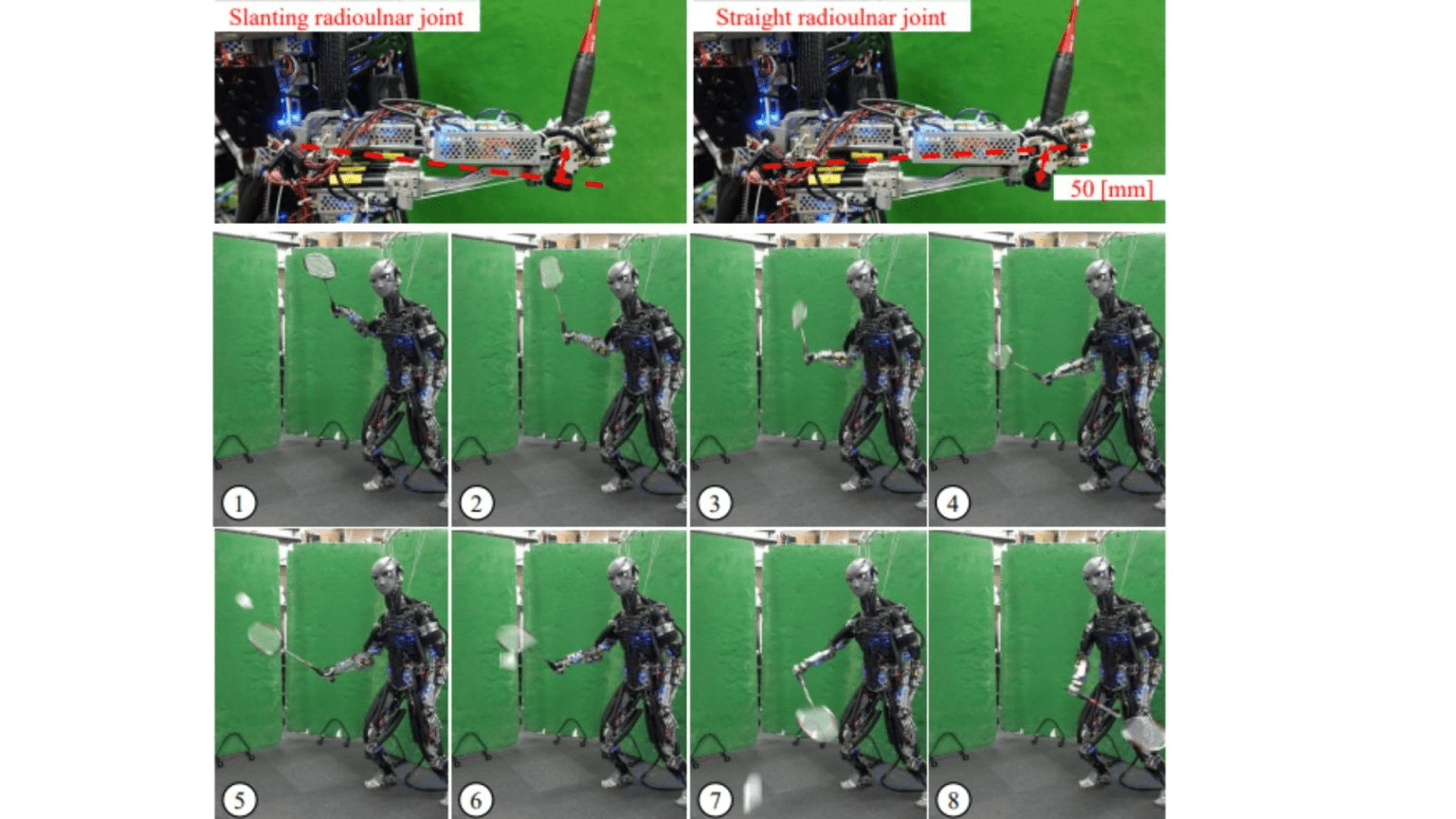
محققان رباتی به نام Kengoro که مجهز به بازوی رادیواولنار شبیه انسان است را با انجام کارهایی مانند: لحیم کاری، باز کردن کتاب، چرخاندن پیچ و تکان دادن راکت بدمینتون آزمایش کردند.
مفصل radioulnar به Kengoro اجازه میدهد تا حرکات دقیق و انسانمانند مثل حرکات ثابت دست با سفتی کم و انتقال گشتاور کارآمد را تکرار کند.
مفصل اریب شعاع و سرعت حرکات را افزایش و پتانسیل خود را برای اعمال ماهرانه در فعالیتهایی که به دقت و سرعت نیاز دارند، نشان داد.
آزمایشهای آینده روی ایجاد یک ربات انساننما با تاندون کوچک با استفاده از ماژولهای مینیاتوری استخوانی-ماهیچهای متمرکز خواهد بود.
این ماژولها را میتوان روی بازو و سایر قسمتهای ربات اعمال کرد.
علاوه بر این، هدف محققان کشف اهمیت بیولوژیکی مفصل رادیواولنار و کشف حرکات ماهرانهتر است، که از این مفصل استفاده میکند.
جزئیات این تحقیق در مجله arXiv منتشر شده است.
نوشته این بازوی رباتیک عملکرد مفاصل انسان را تقلید می کند اولین بار در تک ناک - اخبار دنیای تکنولوژی. پدیدار شد.
واکنش شما چیست؟